paper preview
01arXiv
ADAPT: Analytical Disturbance-Aware Policy Training for Humanoid Locomotion
Keeps humanoids walking through pushes, payloads, and surprise contact by estimating the disturbance and correcting the gait.

Terrain, gait, robustness, and agile movement.

Keeps humanoids walking through pushes, payloads, and surprise contact by estimating the disturbance and correcting the gait.

Turns generative robot policies into steadier walking controllers by steering training toward stable actions.
Keeps robot planners useful when contact, constraints, or objectives make the normal control math break down.
Teaches an armless bipedal-wheeled robot to get back up by applying useful force to the ground.
Teaches quadruped parkour moves like gap jumping and box climbing with a symmetry-aware prediction model.
Adapts a legged robot's walking style across stairs, gaps, slopes, and obstacles using depth perception.

Plans quadruped routes through clutter by checking the robot's whole body for collisions.
Reference motion, imitation, retargeting, and behavior priors.

Copies full-body motions across different humanoid bodies with one shared motion-tracking system.

Uses videos to teach robots which motions people prefer, with fewer hand-labeled examples.
Provides Go2 motion examples so legged robots can train from many walking and gait patterns.
Uses reference motions during training so a G1 humanoid can perform goal-driven parkour skills later.

Studies whether active toes make biped robots more agile, efficient, and impact-resistant.
Places humanoid feet accurately on target footholds while higher-level planners choose the path.

Lets a humanoid follow sparse upper-body task commands while filling in the balance motion.

Learns walking rewards from preferences so robots need less hand-tuned reward design.

Tracks full or partial humanoid motion references while keeping the movement physically plausible.
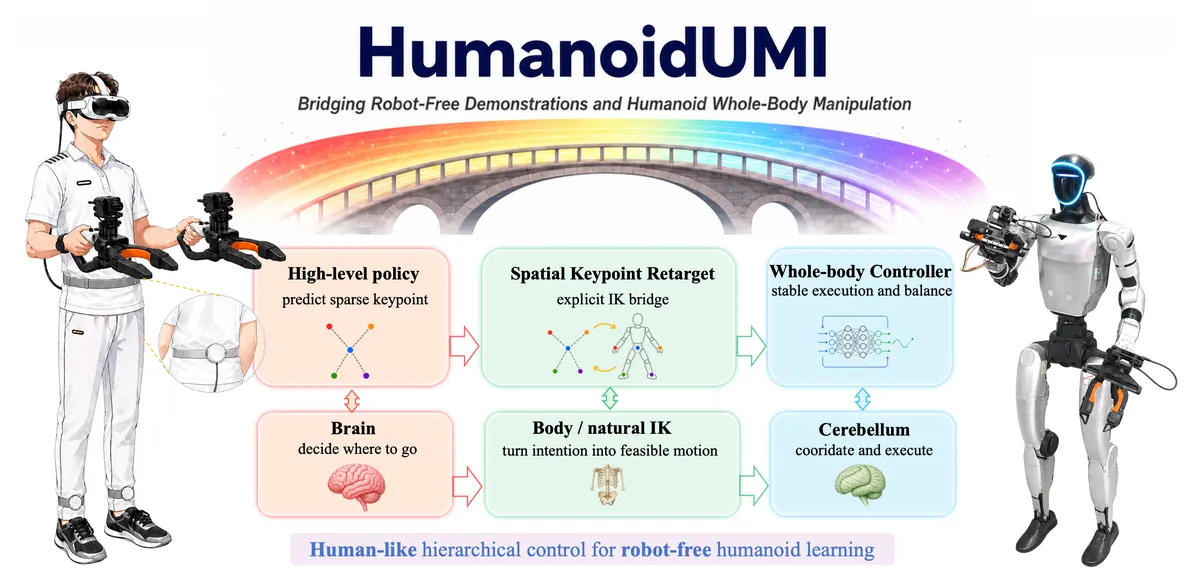
Collects human whole-body demonstrations without the robot present and retargets them into humanoid skills.
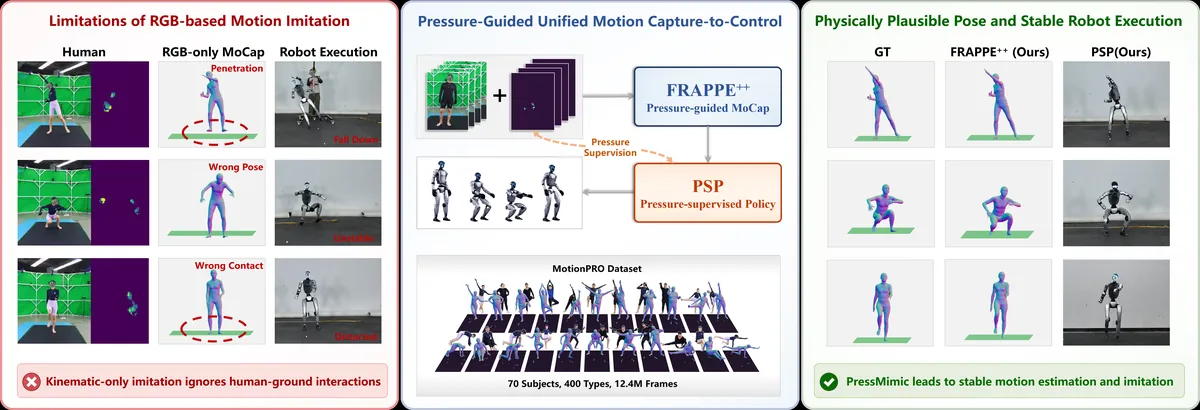
Uses foot pressure so humanoids imitate both body poses and real contact with the floor.
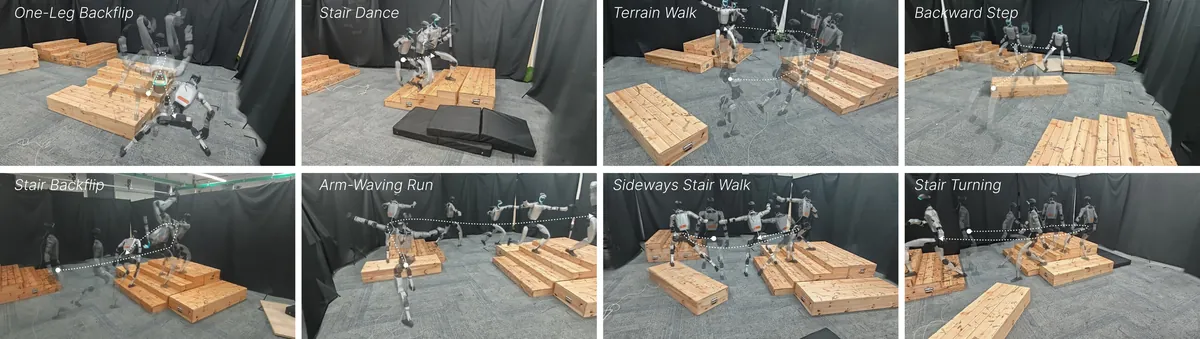
Adapts human-motion skills to robot-centered terrain so humanoids adjust foot placement while moving expressively.
Whole-body task contact: feet, torso, hands, and objects.

Lets a wheeled biped push and slide objects with its legs while staying balanced.

Teaches a humanoid to move, look, and use its hands by adapting human demonstration videos.

Turns human object-interaction motions into physically usable trajectories for a G1 humanoid.
Combines walking and dexterous hand skills so a humanoid can move and manipulate continuously.
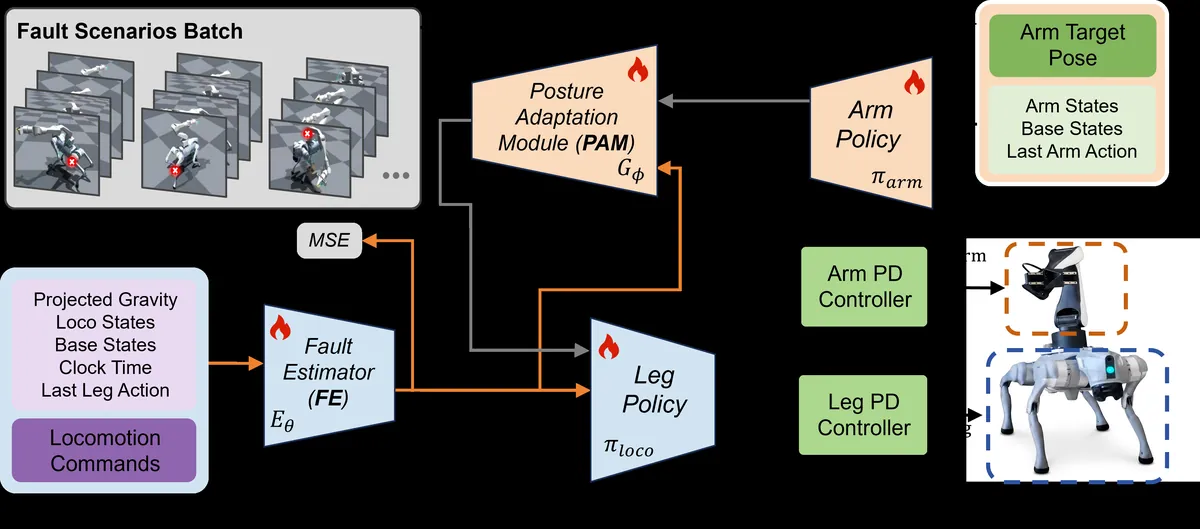
Keeps a legged robot with an arm moving and manipulating even when some motors fail.
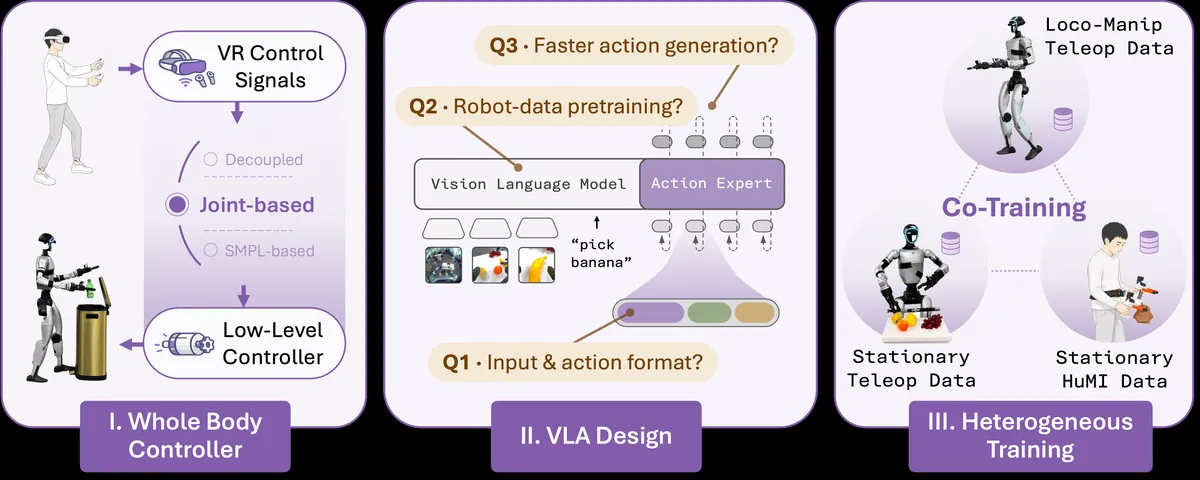
Gives a practical recipe for teaching humanoids whole-body movement and manipulation skills.

Builds vision, body-sensor, and language data for humanoids that move with task instructions.
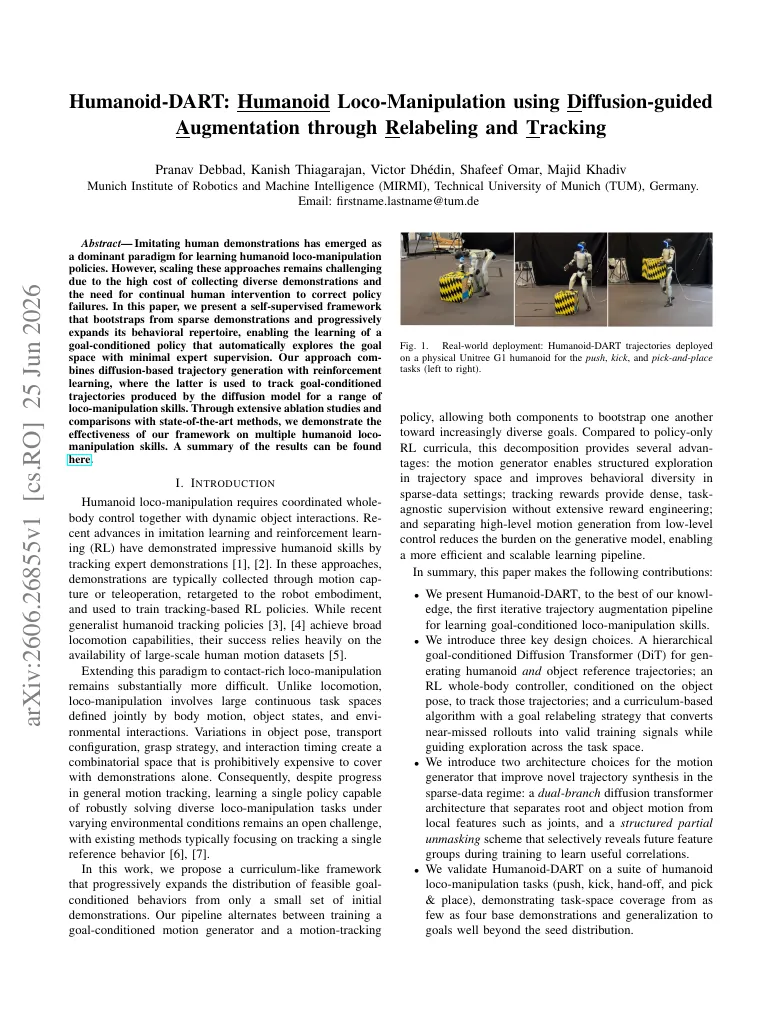
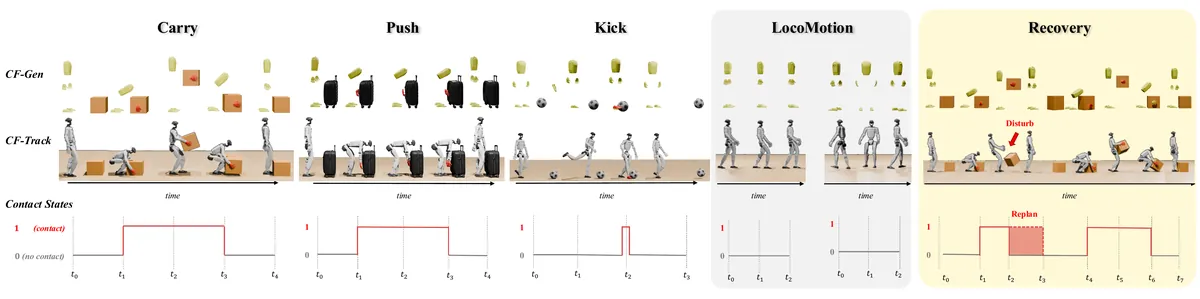
Expands a small set of humanoid manipulation demos into more goal-conditioned training tasks.

Lets people author practical humanoid behaviors around objects, such as moving through doors.
Chains humanoid loco-manipulation skills by planning when feet, hands, or body parts should touch the world.
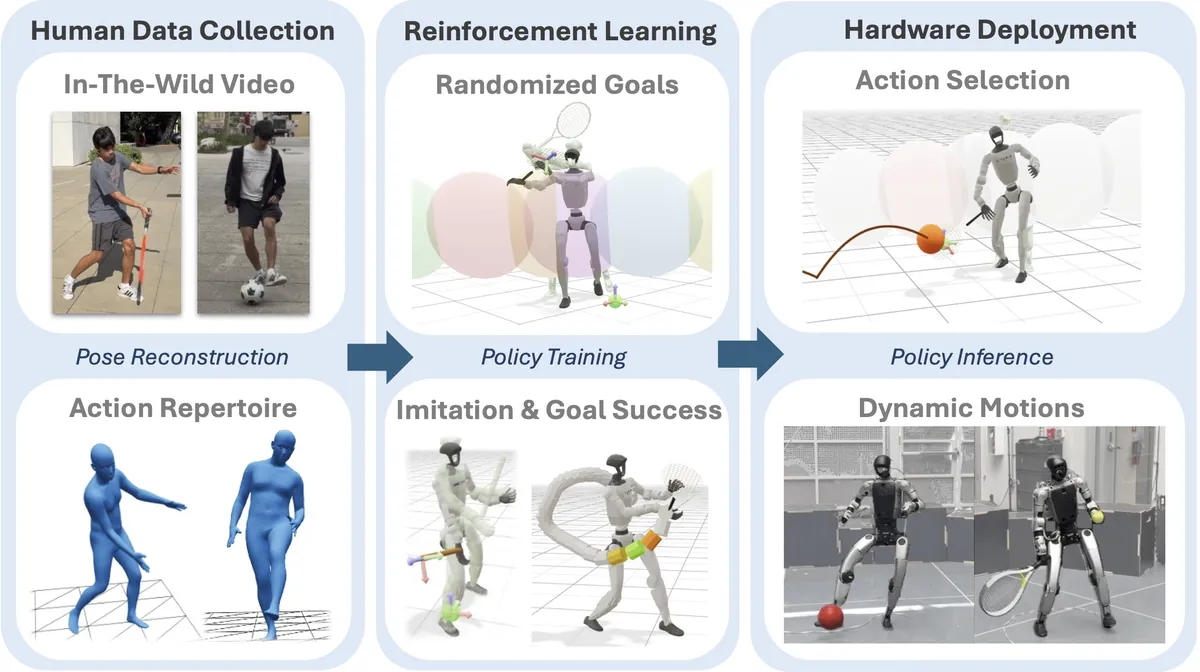
Teaches a G1 humanoid a dynamic skill like a tennis backhand from a single video.
MPC, impedance, safety layers, and whole-body coordination.

Balances a humanoid during physical interaction by coordinating whole-body motion and changing contact forces.

Helps quadrupeds carry payloads more safely by accounting for how the load moves with the robot.

Tests whether humanoid task decisions can turn into stable whole-body motion in simulation.
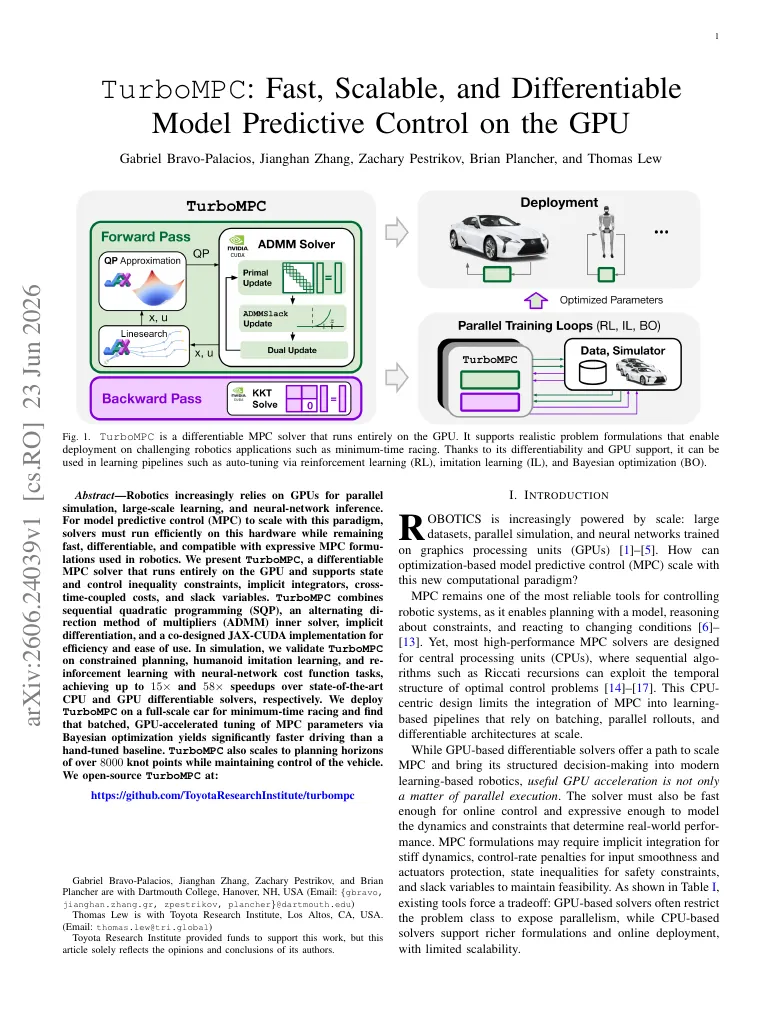
Makes fast robot planning run on GPUs so controllers can make quicker movement decisions.

Keeps a quadruped walking after actuator damage by routing control to the right expert behavior.

Guides online humanoid whole-body control with an existing walking controller instead of retraining.

Steers robot learning toward walking patterns that a model-based controller already knows can work.
Benchmarks, datasets, rewards, simulators, and tooling.

Teaches legged robots to jump over obstacles and stairs by combining simple physics with practice.
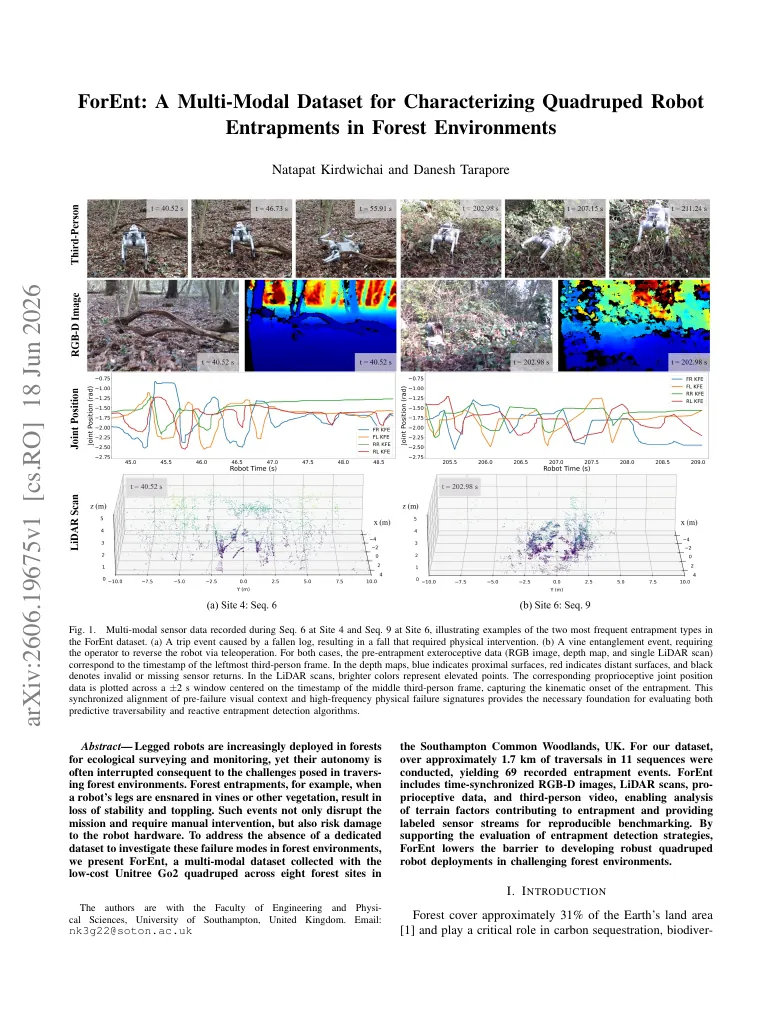
Records forest entrapment failures so quadrupeds can learn to detect and avoid getting stuck.

Trains a quadruped to cross rough terrain without hand-designed gait preferences.

Adds sand simulation so legged robots can test how their feet push through soft ground.
Improves a pretrained robot controller with fewer trials by filtering for more useful exploration.
Benchmarks safe robot training by testing when simulated walking agents break safety constraints.

Helps a bipedal-wheeled robot climb long staircases smoothly with less sensing at runtime.

Trains a quadruped to climb hollow stairs while avoiding leg traps and bad foot placements.
Terrain, state, slip, sensors, and local context.


Estimates a legged robot's body motion by learning which onboard body and leg sensors to trust.
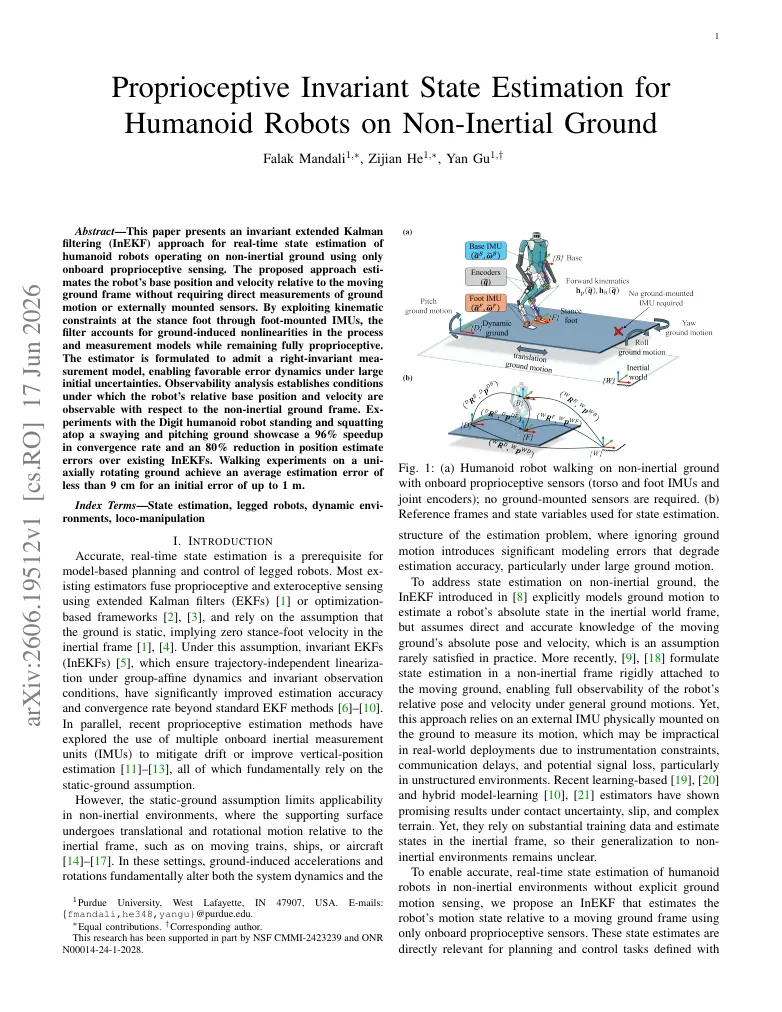
Estimates humanoid body motion on moving ground using only torso, foot, and joint sensors.

Detects foot slip early with a sensorized foot so a legged robot can react before falling.

Helps a humanoid avoid obstacles with limited short-range sensing while still moving toward the goal.
Trains walking controllers that adapt across different quadruped body shapes and perception setups.
Adjacent humanoid robotics methods.


Turns text prompts into robot-feasible humanoid motions by rejecting moves the controller cannot follow.