paper preview
01arXiv
X-Morph: Human Motion Priors for Scalable Robot Learning Across Morphologies
Transfers human motion priors into robot policies across different bodies, from humanoids to quadrupeds and arms.

Terrain, gait, robustness, and agile movement.

Transfers human motion priors into robot policies across different bodies, from humanoids to quadrupeds and arms.
Reference motion, imitation, retargeting, and behavior priors.

Plans humanoid whole-body motion in closed loop by repeatedly replanning from a behavior foundation model.
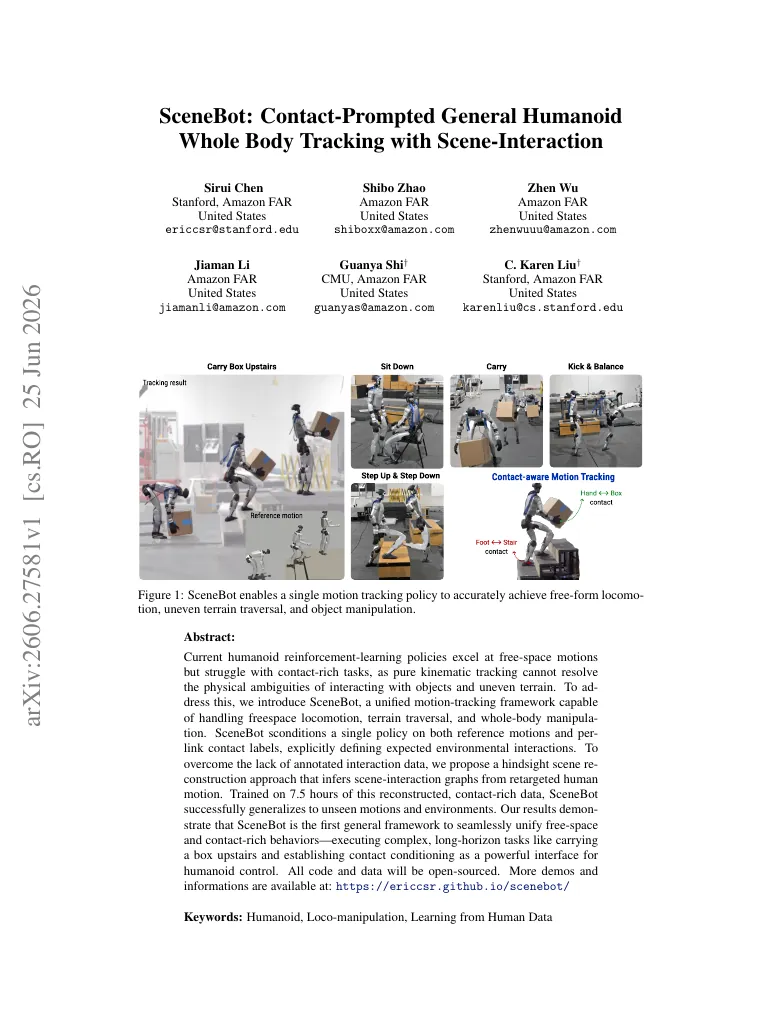
Tracks whole-body humanoid motion while using contact prompts for terrain and object interaction.

Pretrains reusable motor-control tokens from large motion datasets so controllers can transfer to new skills.
Whole-body task contact: feet, torso, hands, and objects.


Teaches humanoids to practice loco-manipulation in reconstructed 3D scenes using synthetic vision-language-kinematics data.
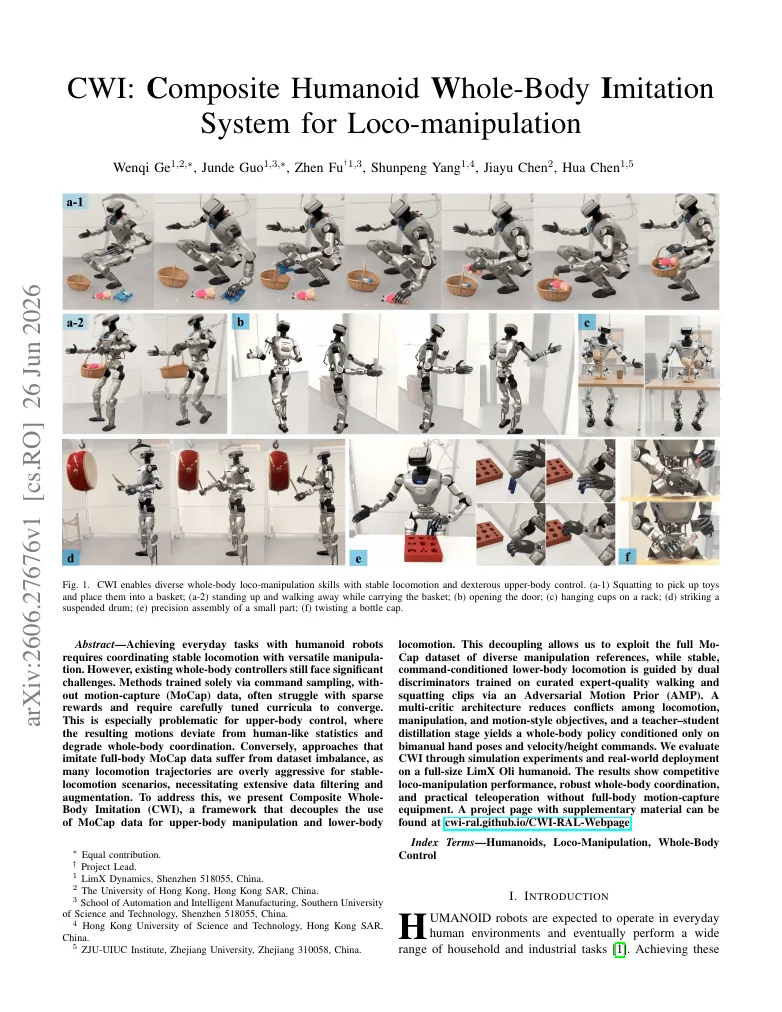
Combines upper-body imitation with lower-body locomotion so humanoids can move and manipulate together.
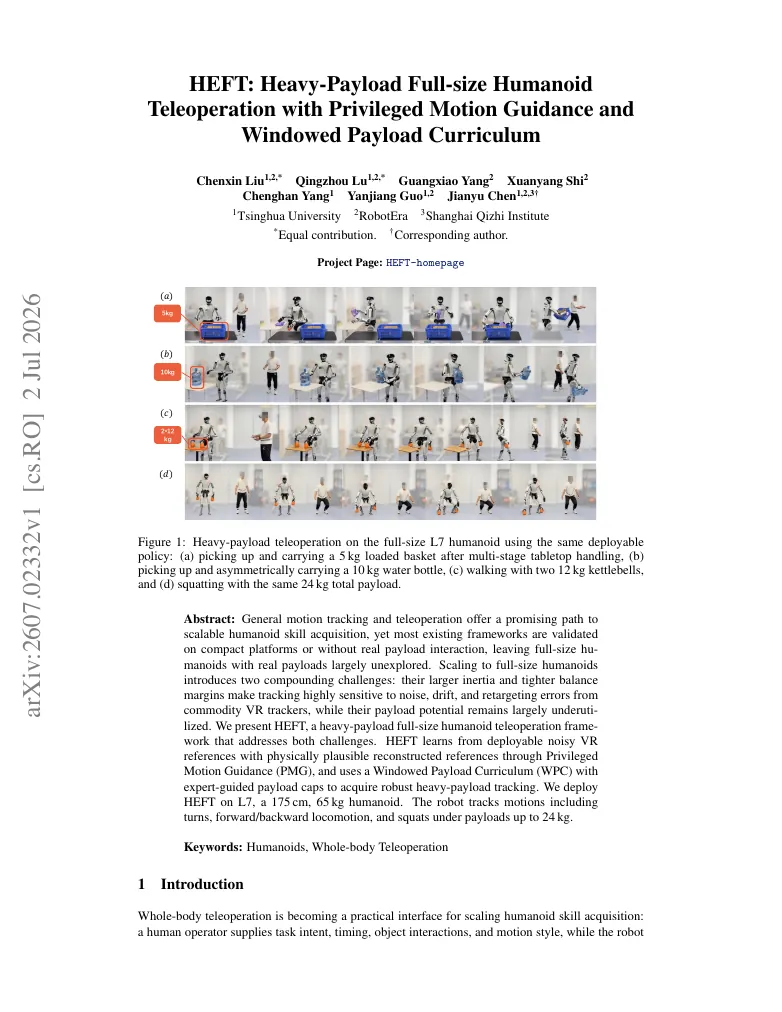
Teleoperates a full-size humanoid carrying heavy payloads using noisy VR tracking and learned whole-body control.
MPC, impedance, safety layers, and whole-body coordination.
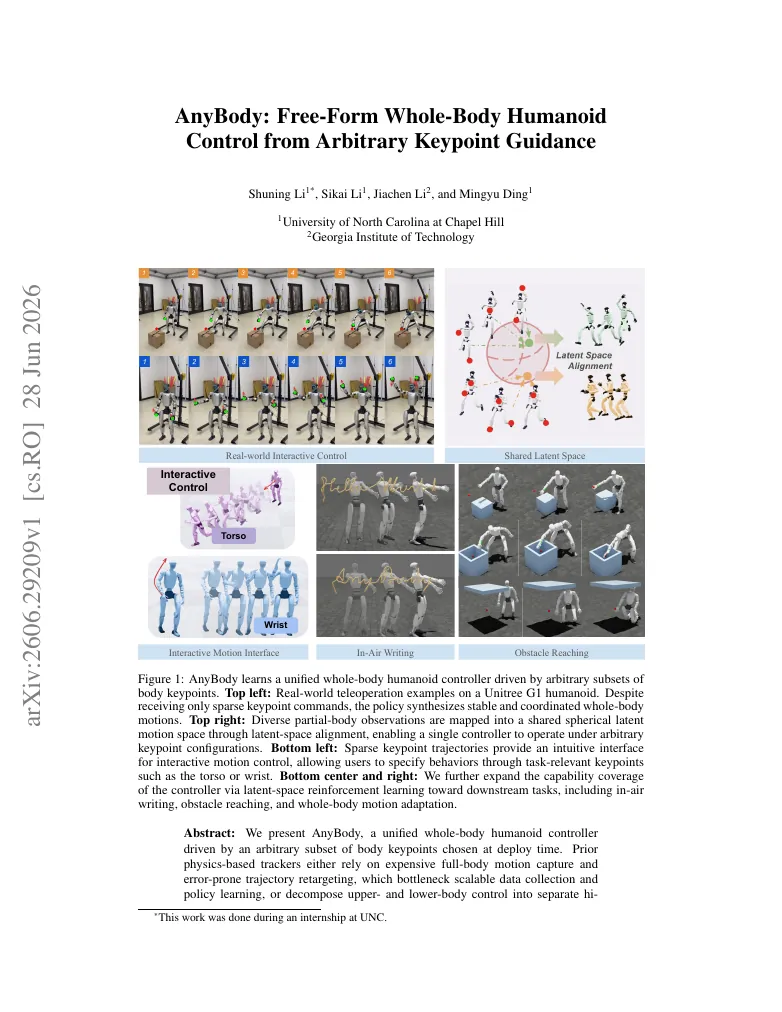
Lets a humanoid follow arbitrary sparse body keypoints by turning them into full-body control.
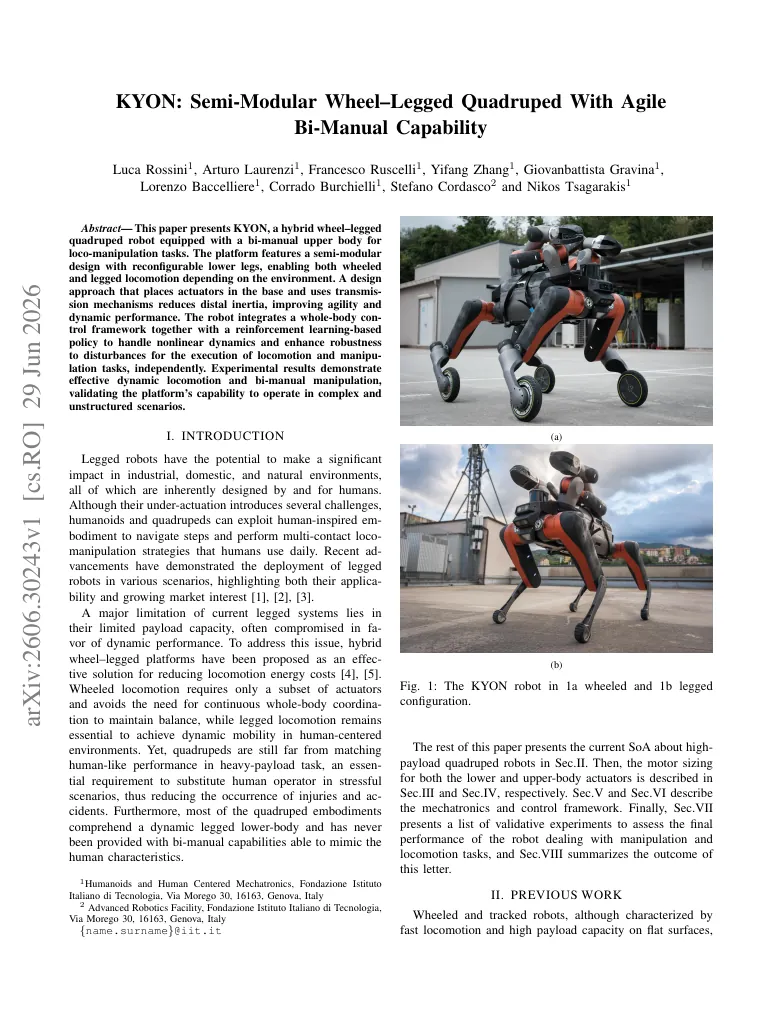
Builds a wheel-legged quadruped with two arms for agile movement and payload handling.
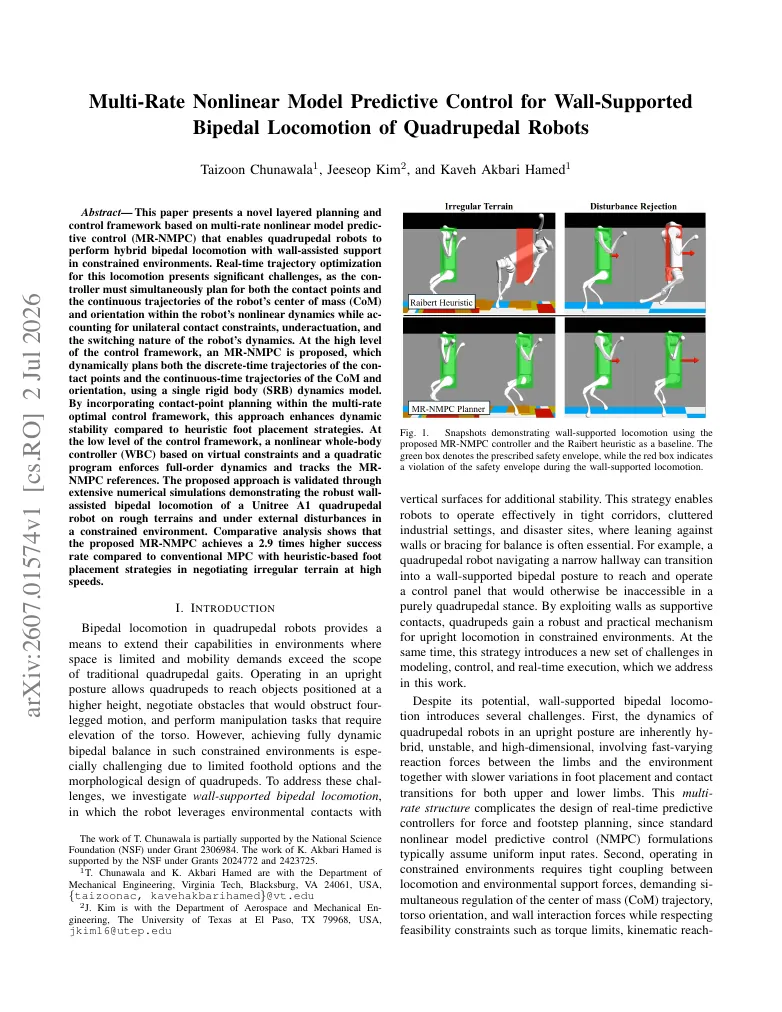
Coordinates wall contacts and bipedal stepping so a quadruped can move through tight spaces on two legs.
Benchmarks, datasets, rewards, simulators, and tooling.


Makes real robot actuators behave more like the ideal motors used in simulation to improve sim-to-real transfer.